Some time ago I wrote a short post about using Data Fusion (DF) to perform some kind of Compressive Sensing (CS). We came with that idea when tackling a common problem in multidimensional imaging systems: the more you want to measure, the harder it gets. It is not only the fact that you need a system that is sensitive to many different physical parameters (wavelength, time, polarization, etc.), but also the point of having huge datasets that you need to record and store. If you try to measure a scene with high spatial resolution, in tens or hundreds of spectral channels, and with video frame rates (let’s say 30 or 60 frames per second), you generate gigabytes of data every second. This will burn through your hard drives in a moment, and if you want to send your data to a different lab/computer for analysis, you will need to wait ages for the transmission to end.
While there have been many techniques trying to solve these problems, there is not a really perfect solution (and, in my honest opinion, there cannot be a single solution that will solve all the problems that different systems will face) that allows you to obtain super high quality pictures in many different dimensions. You always need to live with some tradeoffs (for example, doing low spatial resolution but high frame rate, or gathering a low number of spectral bands with good image quality).

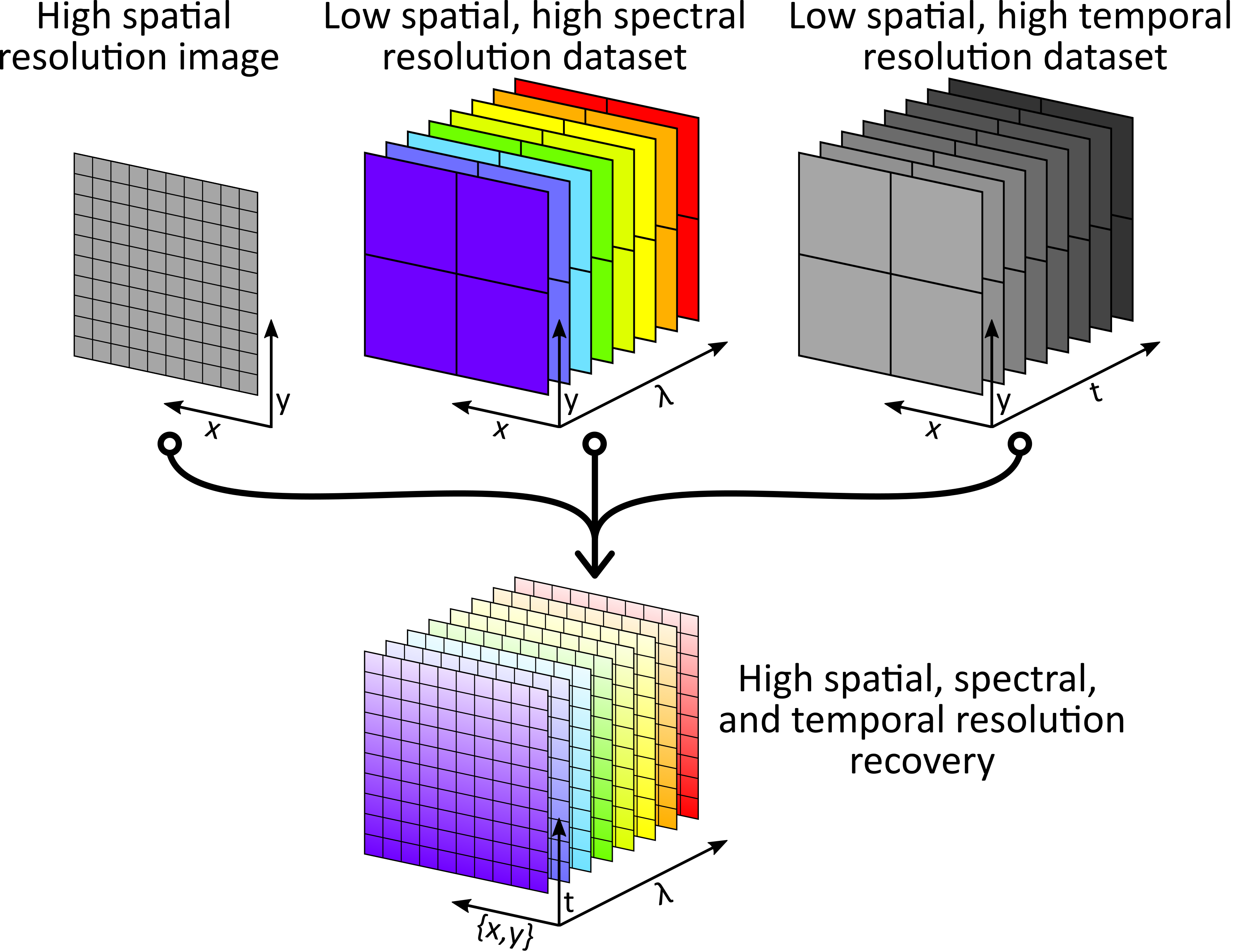
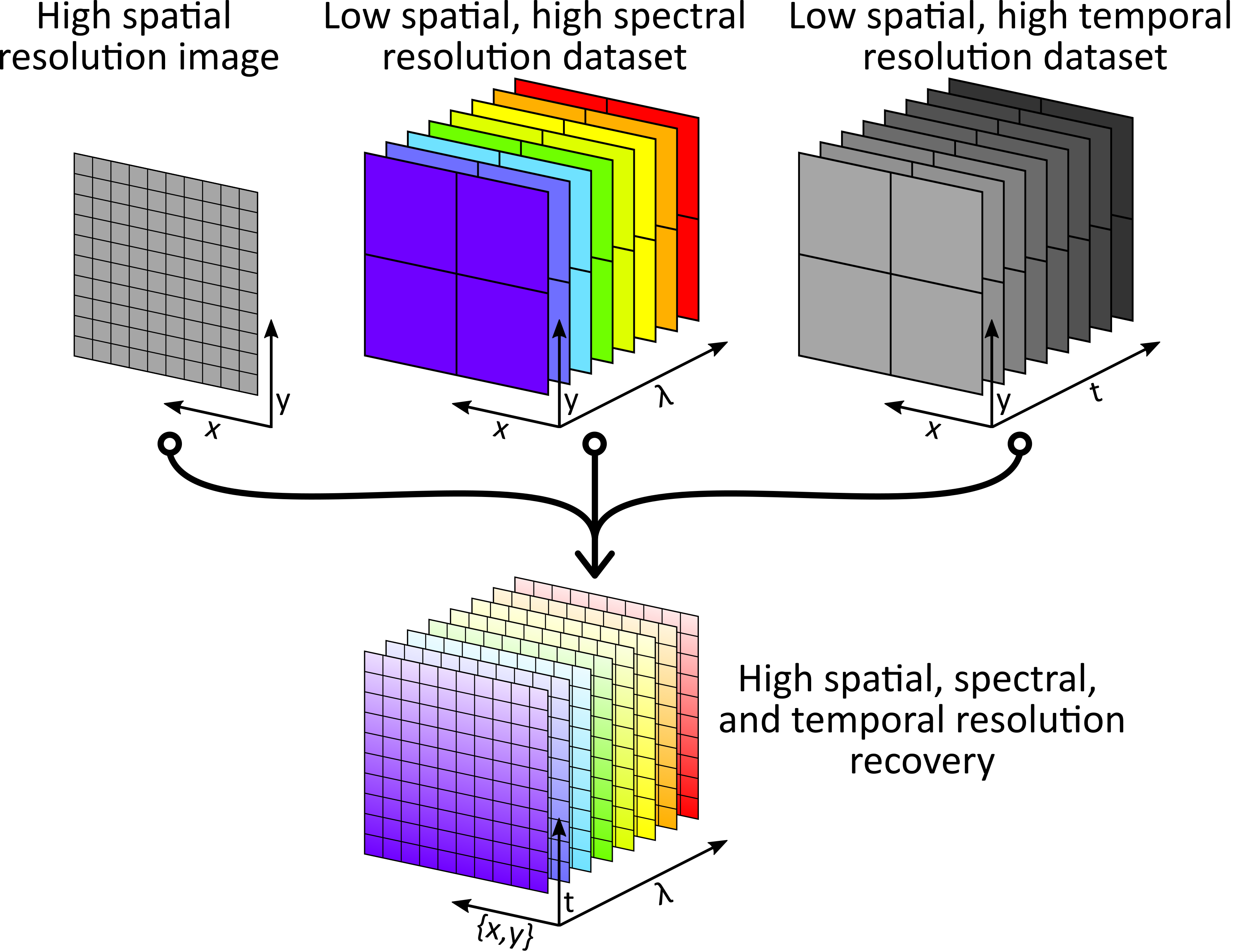
However, there are cool ideas that can help a lot. In our last paper, we show how, by borrowing ideas from remote sensing and/or autonomous driving, you can obtain high resolution, multispectral, time-resolved images of fluorescent objects in a simple and effective manner. We use a single-pixel imaging system to build two single-pixel cameras: one that measures multispectral images, and another that obtains time-resolved measurements (in the ps range). Also, we use a conventional pixelated detector to obtain a high spatial resolution image (with no temporal or spectral resolution). The key point here is that we have multiple systems working in parallel, each one doing its best to obtain one specific dimension. For example, the single-pixel spectral camera obtains a 3D image (x,y,lambda) with a very good spectral resolution, but with very low spatial resolution. On the other hand, the pixelated detector acquires a high spatial resolution image, but neither spectral nor time resolved. After obtaining the different datasets, DF allows you to merge all the information in a final multidimensional image, where all the dimensions have been sampled at high resolution (so, our final 4D object has high spatial, temporal, and spectral resolution).
So, what about the compression? The cool thing here is that we only obtain three different datasets: the high resolution picture from the camera, and the two multispectral/time-resolved images from the single-pixel cameras. However, after the reconstruction we obtain a full 4D dataset that amounts for about 1 Gigavoxel. In the end, if you compare the number of voxels we measure versus the number of voxels we retrieve, we have a compression ratio higher than 99.9% (which is quite big if you ask me).
As a sample of the technique, we show the time-resolved fluorescence decay of a simple scene with three different fluorophores (each one of the letters you see on the following figures), where the species are excited and the fluorescence process takes place in less than 25 ns (woah!). You can see the live reconstruction here, and a short talk I made a while ago after the info of the paper, where you can see all the details about the system, the reconstruction algorithm, and so.
Giga-voxel multidimensional fluorescence imaging combining single-pixel detection and data fusion
F. Soldevila, A. J. M. Lenz, A. Ghezzi, A. Farina, C. D’Andrea, and E. Tajahuerce, on Optics Letters (and the arxiv version)
Abstract: Time-resolved fluorescence imaging is a key tool in biomedical applications, as it allows to non-invasively obtain functional and structural information. However, the big amount of collected data introduces challenges in both acquisition speed and processing needs. Here, we introduce a novel technique that allows to acquire a giga-voxel 4D hypercube in a fast manner while measuring only 0.03% of the dataset. The system combines two single-pixel cameras and a conventional 2D array detector working in parallel. Data fusion techniques are introduced to combine the individual 2D and 3D projections acquired by each sensor in the final high-resolution 4D hypercube, which can be used to identify different fluorophore species by their spectral and temporal signatures.
Deja una respuesta